Subjects in self-contact
- TRAIN set: 4 subjects
- TEST set: 2 subjects
In each recording, the subject is motion tracked with a marker-based motion capture system (Vicon).
|
 |
Multiple cameras
- 4 different views
- 900x900 resolution
- 50 fps
- Camera parameters:
- extrinsics
- intrinsics for 2 different camera models (one assuming image distortion, one ignoring it)
- The TEST set consists of only one random frontal camera viewpoint per sequence, to avoid simplifying the 3D Reconstruction challenge through multi-view triangulation/optimization.
|
 |
Various self-contact actions in various scenarios
Each subject performs the following actions.
- standing (116 scenarios)
- sitting on the floor (20 scenarios)
- interacting with a chair (36 scenarios)
|
 |
GHUM and SMPLX meshes
- Ground-truth, well-alligned mesh - obtained by fitting the GHUM model to accurate 3d markers, multi-view image evidence and body scans
- We retarget the GHUM meshes to the SMPLX topology and provide pose and shape parameters for both
- 50 fps
|
 |
3D skeletons
- Ground-truth 3d skeletons with 25 joints (including the 17 Human3.6m joints)
- 50 fps
|
 |
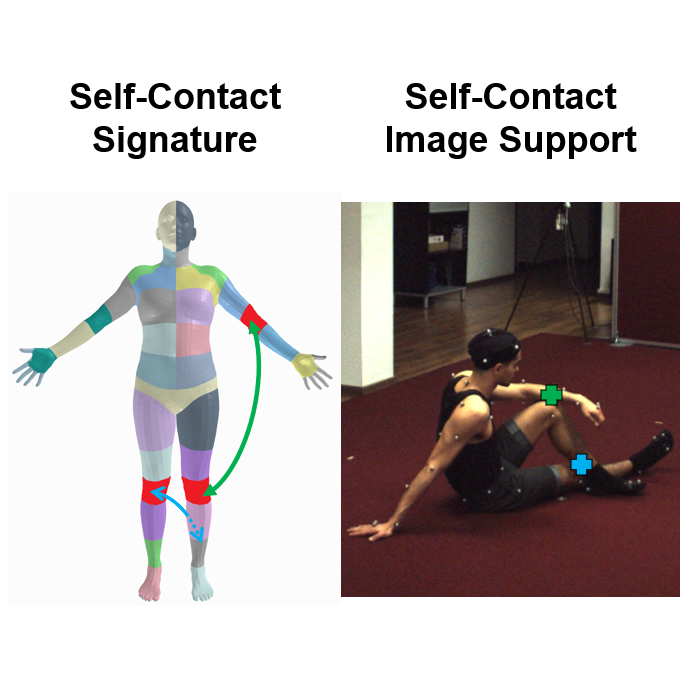
Self-contact annotations
Each of the 1032 recordings contain:
- 1 video timestamp where self-contact is established
- the self-contact signature annotation (multiple correspondences on the body surface between two triangle ids / vertex ids / region ids)
- the self-contact image support annotation (the projection of each self-contact vertex correspondence in the image)
Due to the 4 viewpoints, this amounts to 4128 triplets of images, self-contact signatures and self-contact image support.
|
 |
